L4G – Local(Distributed) Control for Global(Overall) Performance Optimization
The Local4Global methodology/system is applicable to generic Technical Systems of Systems (TSoS) that comprise highly heterogeneous TSoS. Moreover, it will, by its very nature, be totally scalable and computationally efficient.
Few of the most important Local4Global features are summarized in the list below. Local4Global is:
- a generic, integrated and fully-functional methodology/system for TSoS.
- applicable to TSoS where their respective constituent systems should operate as fully autonomous units that react and interact depending only on their local environment in order to optimize the TSoS emerging performance at the global level.
- applicable where changes in the topology, environment or hierarchy of the TSoS are expected. In fact, there is no need for an elaborate and tedious effort to deploy the Local4Global system or to re-design/re-configure such cases.
- a methodology able to provide a “plug-and-play control mechanism” for the constituent systems with the ability to fully exploit each constituent system’s abilities by embedding within it learning, evolving and self-organizing capabilities.
- applicable in cases where elaborate, “expensive” infrastructure might not be available. To this end, a scheme providing to each and every constituent system with information coming from all over the TSoS, might not be feasible.
Local4Global methodology can be simply described as follows (see Figure below):
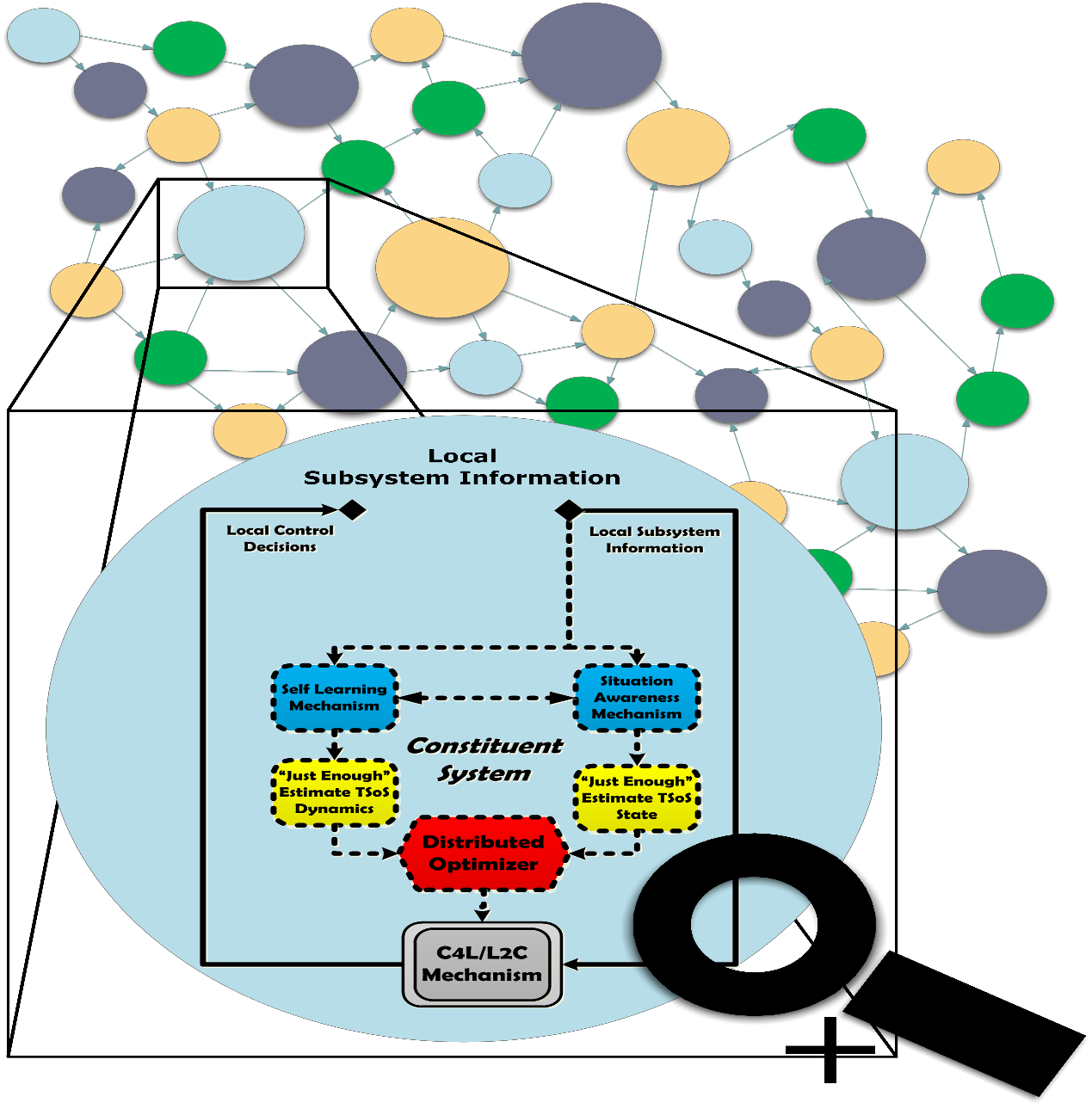
- Within each of the constituent systems, a self-learning mechanism is embedded which provides a “just enough” estimate of the TSoS dynamics. Moreover, a situation awareness mechanism is responsible for extracting – from local measurements – the absolutely necessary global TSoS information needed in order for the constituent system to calculate optimal actions.
- The information provided by the self-learning and the situation awareness mechanisms are used by a distributed optimizer in order to calculate the constituent system optimal actions.
- These actions are appropriately modified by the so-called Control for Learning and Learning to Control (C4L/L2C) mechanism, so as the constituent systems’ actions concurrently attempt to optimize the TSoS performance at the global level and maximize the learning capabilities and situation awareness of the constituent systems. In essence, the C4L/L2C mechanism compensates for “mistakes” made by the self-learning and situation awareness mechanisms and guarantees the efficient performance of the overall Local4Global system.
In addition a higher abstraction level description of Local4Global tool is presented in the Figure below:
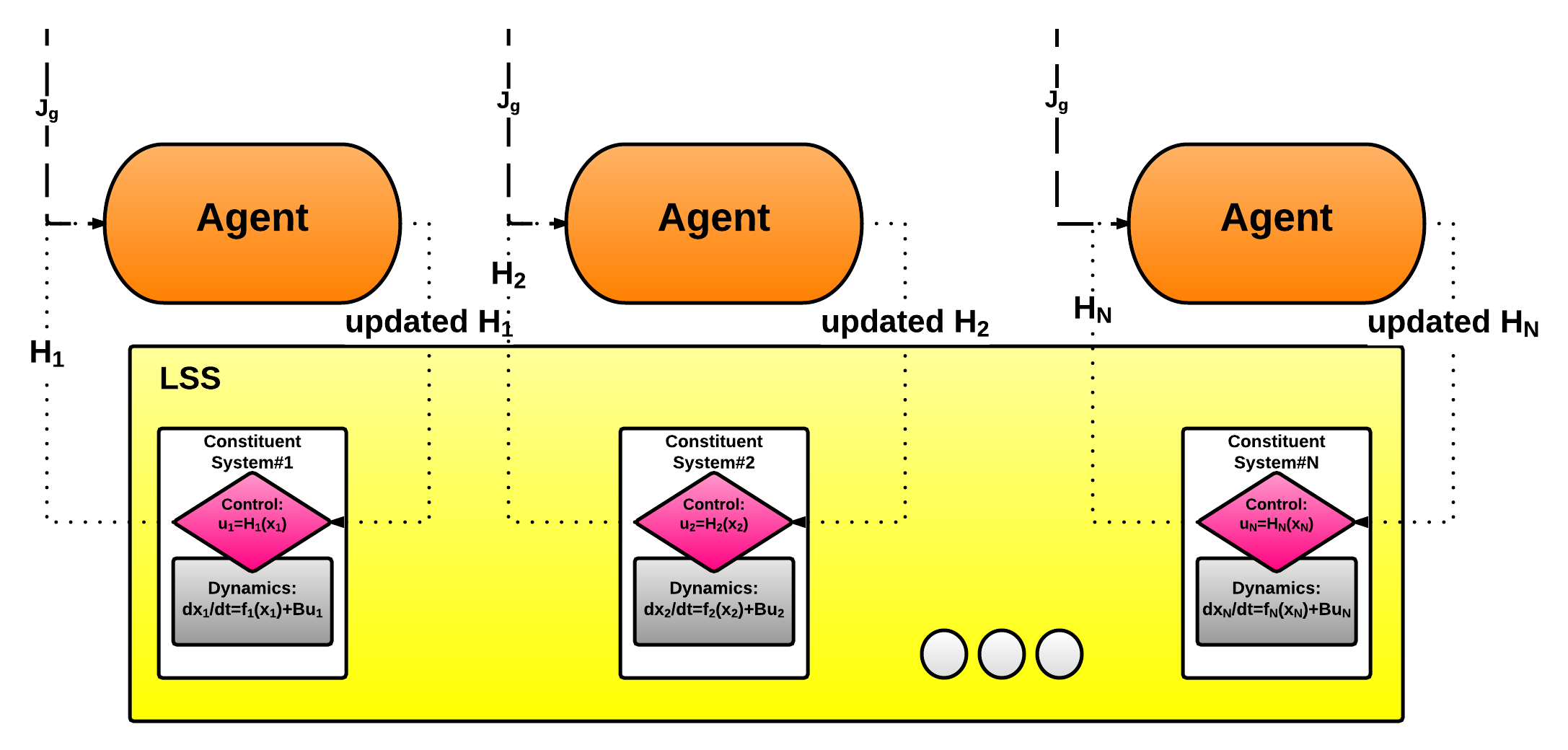
More specific the algorithmic flow may be described as follows:
- Step-1: initialize the control parameters in each constituent/local agent (usually to the ones used in practice)
 , define a reasonable iteration period interval
, define a reasonable iteration period interval  (depending on the application characteristics and particularities), define a continuous smooth time-decaying function representing the random perturbation area size
(depending on the application characteristics and particularities), define a continuous smooth time-decaying function representing the random perturbation area size  and define the respective initial value
and define the respective initial value  , also let
, also let  denote the number of the current iteration and
denote the number of the current iteration and  the number of constituent systems.
the number of constituent systems. - Step-2: apply each local set of the control parameters of the current iteration to each respective autonomous constituent system and commute the overall performance
 at the end of the current iteration (at the “cloud” central level).
at the end of the current iteration (at the “cloud” central level). - Step-3: feed each local agent with the respective set of local control parameters used and the achieved overall performance.
- Step-4: repeat the process described until convergence is reached.
For more details please kindly refer to local4global-fp7