Autonomous Navigation of Teams of Unmanned Aerial or Underwater Vehicles for Exploration of Unknown Static & Dynamic Environments
Experiment 1: One AUV is out, but the mission has to continue
In this experiment we started the mapping task using a fleet of 3 AUVs. The PCAO methodology was starting to produce waypoints in such a way to fully exploit the 3 AUVs capabilities and dynamics (installed sensors, maximum speed, etc.).
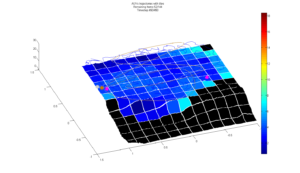
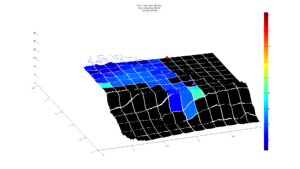
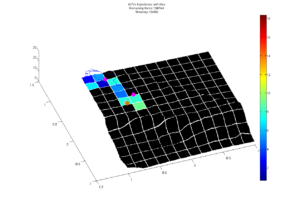
Evaluating the mapping progress when all AUVs are operational.
Figure 1 illustrates the progress of 3 AUVs (blue lines) until the time-step 90, with the current AUVs’ positions (magenta color) at this time-step. The black tiles correspond to ones that have not ever been measured by any of AUVs, while the colorful ones correspond to the areas where the AUVs have started (and may completed) their estimation process. The color in each one of them is an error index that varies from dark-blue, in case where the AUVs have acquired a perfect match from the ground truth, to dark-red in case where the measurements do not have any correspondence with the actual surface that underlines the specific tile. Final, these error indices per tile have been applied to the real surface (ground truth map) so as to be able to evaluate the efficiency of the proposed approach. It is worth highlighting that the algorithm does not use any of information regarding the ground truth map (or error index): during the exploration process, the AUVs adjust their movements taking as input only their bathymeters’ measurements and their locations (as estimated by the localization module).
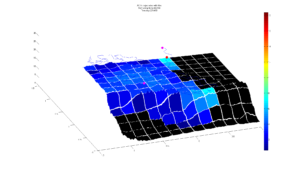
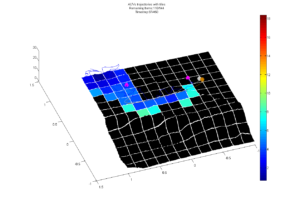
Noptilus-1 had an equipment malfunction
At time-step 100 we assumed that the Noptilus-1’s propeller didn’t correspond to our control commands and the AUV is considered from now on, unable to move (Figure 2, red thick sphere). Under these new circumstances, the algorithm is called to do the best it can be done with the remaining properly working infrastructure. Please take into consideration that, this kind of incident will make the majority of today’s approaches to fail, because they can either stop the remaining AUVs for a trajectory redesign or continue their predefined trajectory leaving an important part of the operation area uncovered.
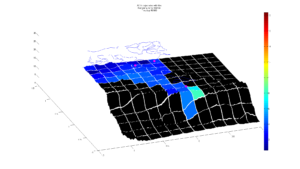
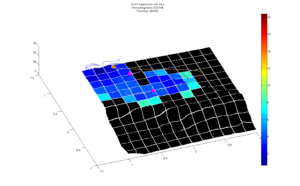
Completion of the experiment
The mapping process is terminated after 450 time-steps where the AUVs covered the majority of the operation area, estimated 136 from 144 tiles (Figure 4). It is worth noticing that in the majority of estimated tiles, the AUVs acquired a satisfactory number of bathymeter’s measurements, different in each case, since it is highly dependent on the actual morphology that underlines the tile.
Experiment 2: Performing Target Tracking simultaneously with the mapping task
In this case, track a moving target while, concurrently, construct a map of the seafloor area visited by the moving target.
Two AUVs were employed for this purpose, while a third AUV was used as the moving target. The information regarding the moving target that is available to the two AUVs is the AUV-to-moving target distance. In other words, the two AUVs do not know the position of the moving target, but they are using their AUV-to-moving target distance measurements in order to estimate the — dynamic — position of the target.
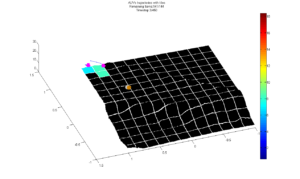
Figure 5 illustrates the progress of this experiment until time-step 4. As far as the evaluation of mapping task is concerned, we maintain the same representation as before. The moving target is marked as brown sphere, while its estimation is marked as gray sphere.
The difference from the previous experiment is evidential, even from time-step 18 (Figure 6), where one AUV (Noptilus-3), chooses to approach almost directly the target in order to minimize their Euclidean distance.
In the sequel, and more specific at time-step 139 (Figure 8), it can be observed an another feature of the algorithm. At this time-instant, the distance between the target and any of the two AUVs in more or less the same, so the algorithm, in order to achieve a more efficient information about the sea-bottom, applies a “switch”. This switch is achieved by assigning the task of target tracking to Noptilus-1 and correspondingly relieves Noptilus-3 of the “burden” of target tracking. Please note that such a “switch” allows to the AUV (Noptilus-3) that is “easier for it to explore more unexplored area” to dedicate itself to the mapping subtask.
The Noptilus-3 now can perform any arbitrary trajectory, in order to cover the tiles that are underneath of it, in the best possible way (Figure 9). The aforementioned switching process is performed many times during the experiment, in cases where the AUVs have more or less the same distance from the target and there is a clear advantage for the specific switching. It is worth highlighting that, the algorithm chooses to make the transitions only when the AUVs have more or less the same distance from the target, in order to avoid a sudden increase in the estimation error of targets motion.
The experiment is terminated after 450 time-steps (Figure 10) where the AUVs have accurately estimate, mainly but not limited, the area where the target was moving, while at the same time have estimated the target trajectory in satisfactory level.