Munich Traffic Control
The research leading to these results has been partially funded by the European Commission under the European Union’s Seventh Framework Programme (FP/2007-2013)/FP7-ICT-2013.3.4, project LOCAL4GLOBAL under the contract #611538.
Test Case Description:
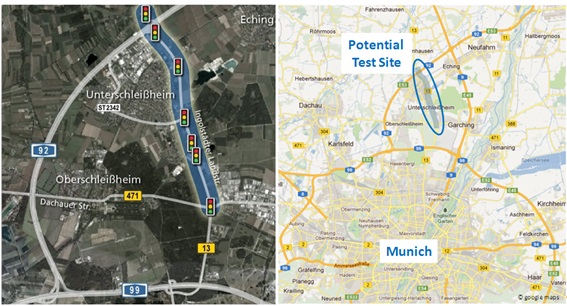
The Bavarian Road Administration has defined a test site to test and evaluate the outcomes of decentralized CAO application (also abbreviated as Local4Global CAO), namely the Federal Road B13 in the north of Munich (Germany) (see Figure 1). This road section with a length of more than 7 km allows for the test of new technologies in a rural environment with comparably long distances between intersections and high-speed sections. The Bavarian Road Administration has identified this road, because of the high traffic loads and good potential for improvement. To acquire reference data on the traffic flow, the Bavarian Centre for Traffic Management installed wireless traffic sensors which will be available for the project. Additionally, floating car data of equipped vehicles may be used to add further information.
The road stretch is equipped with traffic signal components by Siemens. Traffic light configuration and harmonization of signalling times will be achieved in cooperation with the local road maintenance office and the companies that have delivered the hard- and software. Moreover, control of cooperative vehicles will be realized by setting up a bi-directional communication between vehicles and a control centre or roadside infrastructure: on-board devices or smartphones will be used to deliver the route and speed recommendations as calculated by the Local4Global CAO system to the drivers. On the other hand, information from the vehicles is used within the control centre or roadside controllers in order to optimize traffic signal control considering the prevailing traffic conditions. The traffic signal systems and the vehicles will have to be combined in an integrative communications- and control structure. The network of the traffic signal system is connected wireless (e.g. UMTS) to the control entity, where traffic data and information on signal stages is analysed and processed.
Constituent Systems:
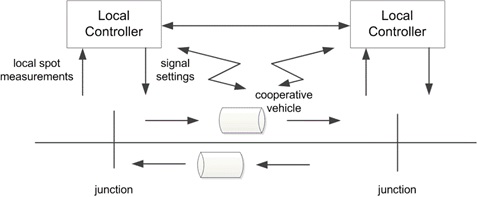
- Junction controllers that control the green times of the stages at a second-by-second basis. The sensor information they receive is: (a) the flow (veh/h) and occupancy (%) at the links (road segments) approaching or leaving the junction; and (b) the location and speed of cooperative vehicles that are in the vicinity of the junction. In addition, each junction controller receives appropriate information from all adjacent controllers so as to coordinate the decentralised actions and enable efficient operation at the network level.
- Cooperative vehicles that decide their routes and speed so as to optimize their travel time. The sensor information they receive is (a) their location and speed and (b) the flow and occupancy of link (road segment) they are currently present.
The figure below sketches the Traffic TSoS constituent systems and their interaction.
Some interesting features of the specific TSoS are:
- Use of local information to globally optimize TSoS performance (average traffic network mean speed).
- Constantly changing interactions (between junctions) and topology (cooperative vehicles are constantly moving) and constantly changing dynamics (traffic demand and traffic patterns of vehicles).
- Combination of continuous (vehicle flow), discrete (green lights, cooperative vehicles) and highly stochastic (the human factor and the traffic demand/patterns) characteristics. Extremely complex and discontinuous dynamics.
- Emergent behaviour (particularly during congestion).
- Heterogeneity (two completely different types of technical constituent systems: junction controllers and cooperative vehicles).
Cost Function:
The aim of the optimization process is to maximize a representative performance index through a periodic re-tuning of these set of parameters per junction. A performance index commonly used in this respect is the Network Mean Speed (NMS) [km/h]. However optimizing NMS only is not sufficiently enough since the Network Demand (ND) affects heavily the NMS in an approximately disproportional manner; usually varies throughout the day and the period of the year. For this reason, similarly to vehicle-kilometers index, a representative metric – namely Network Productivity (NP) [km∙veh/h2], has been adopted. NP metric considers the multiplication product of Network Mean Speed (NMS) [km/h] and Average Network Demand (ND) [veh/h], so as to “weigh” the NMS improvements in cases where ND is also increased. An estimation of this performance index became available from the measurements provided by the loop detectors of the specific network. Utilizing occupancy and flow measurements, the Network Mean Speed [km/h] and Average Network Demand [veh/h] were calculated so as to finally calculate the Network Productivity (NP) [km∙veh/h2].
Real-Life Results
The Local4Global system in Spain was connected to the road traffic computer in Munich to collect field data during 4 weeks in June 2016 on regular weekdays.
Each day datasets corresponding to a daily off-peak period between morning and evening and another to the evening peak period were injected separately and consecutively in the Local4Global model that called the signalling local controllers generating the signalling decisions, commuting them to signal controllers in the model and to connected vehicles in the model. Each simulation is iterated 10 times with the global optimizer turned on for fine-tuning.
Contingency to field conditions such as detector failures were tested during this scenario.
The connected simulation allowed to extract realistic results that can be compared to the reference scenario in the same demand and boundary conditions. L4G showed a capacity to accommodate a greater throughput of traffic than the baseline.
The comparison shows also a good improvement (42%) in the case of peak hour traffic and a very slight improvement (1%) during off-peak traffic, in terms of average network speed. Between the L4G scenarios of with and without C2X co-operative vehicles, it was shown that the L4G system with 10% C2X co-operative vehicles generally perform similarly to the L4G system without such vehicles.
